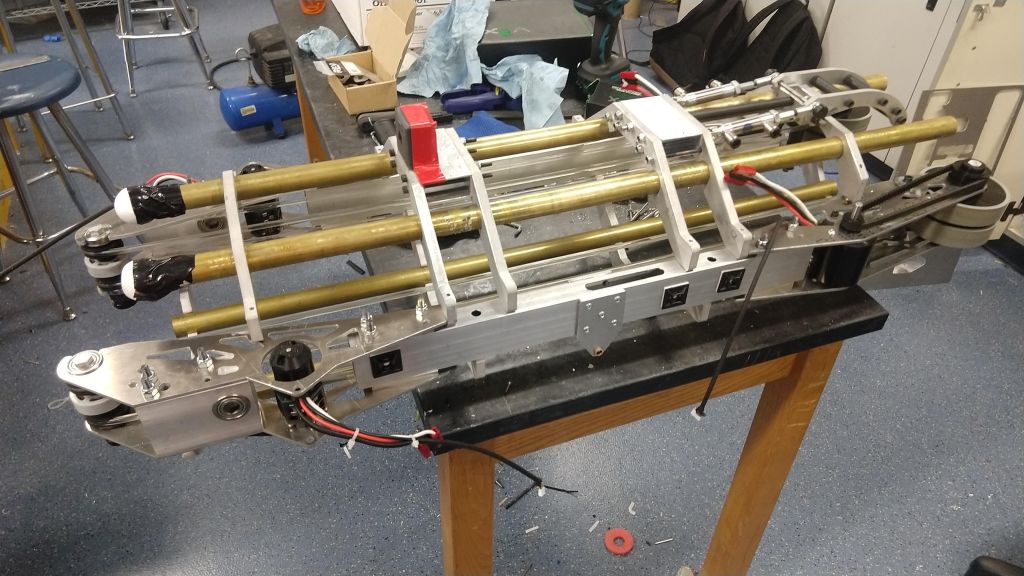
Lots was finished yesterday and today. We continued our “pit stop” yesterday and were able to fully complete the tube and get most of the electrical (except for a few connections) ready. All that was left to be done for today during fourth period (we’ve been working during fourth period at school since a good amount of us have off-roll) was to finish wiring and attach the tube.
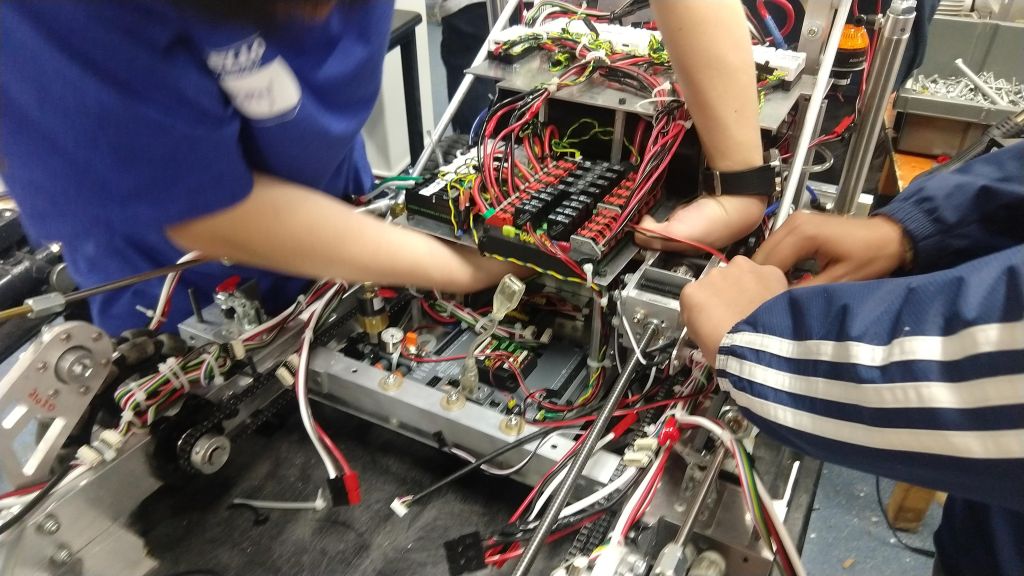

However, what was supposed to be a 15 minute wiring job today during fourth period turned out to be a little longer. Once we had Krish look over a few connections (after school ended), the wiring was finished and the tube was put on (in about 5 minutes). We quickly headed over to testing to make sure everything worked and to hand off to software.
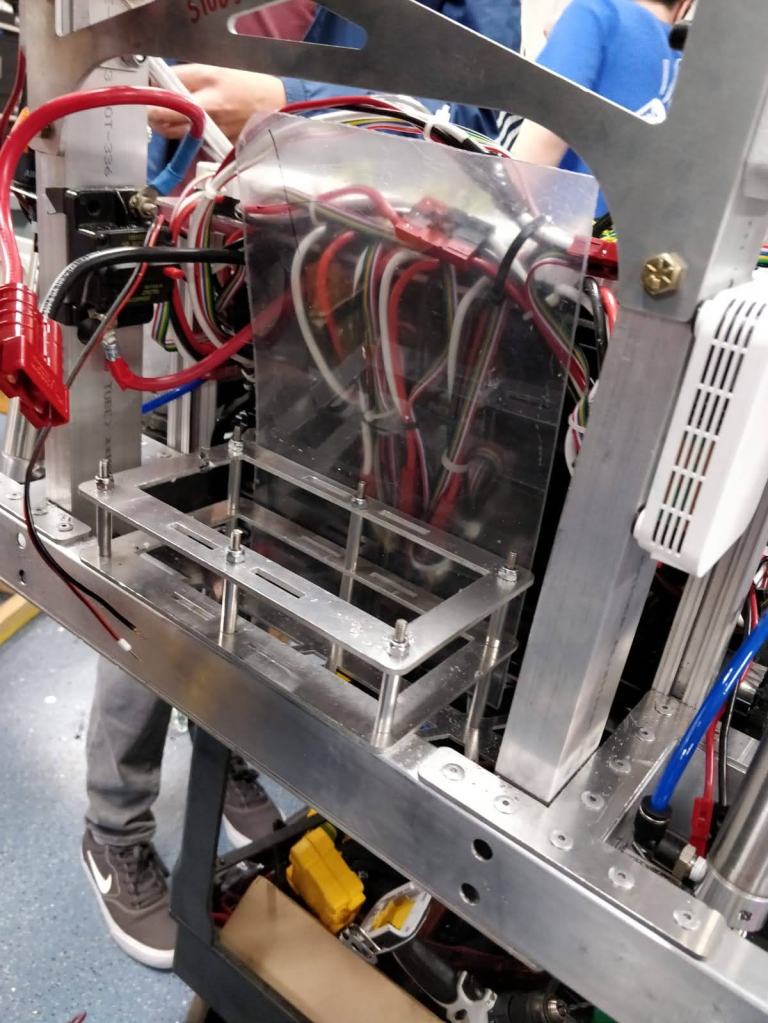
Aaaaaaaaaaaaaand…………………….. things did not go so well. Everything worked perfectly except for the pneumatics. The robot was not able to build pressure in the pneumatic system and therefore the pneumatics couldn’t work. We figured out that a leak must be causing the problem and after a couple hours the problem was located to the manifold. Now I’m not sure what the problem was exactly but some time was spent trying to fix that leak and make sure that it was tight. Only around 7:45 were we able to put everything back onto the robot and get it fully wired. We were able to quickly test and make sure everything worked.
As of now, every element of the robot – both mechanically and electrically – works. In terms of controls, everything runs smoothly and as needed. The additions that will be made tomorrow are some macros for set height/angle positions for the tube and limelight automatic adjustment as well. Once those basic elements (along with a basic autonomous) are finished, we should have everything we need to be a high-performance robot.
Tomorrow we’ll have some time to drive and software will also get some time to work on macros and controls, autonomous, and limelight tracking.
